赋予钢铁以眼睛 | 造物背后的视觉算法逻辑

不仅是看见,更是“重建”
在传统的钢结构防火涂料施工中,质量往往取决于老师傅的“手感”和“经验”。 但在贝恩机器人的世界里,我们将这种模糊的“经验”,转化为了精确的“算法”。
我们常说机器人是“自动”的,但如果它看不见,就只能算作“盲动”。 今天,我们想聊聊贝恩机器人的核心——视觉算法。看看我们是如何给冰冷的钢铁设备,装上一双洞察毫厘的“眼睛”。
人的眼睛看到的是画面
而贝恩机器人的“眼睛”看到的是空间。


实景图像
扫描动态


模型生成
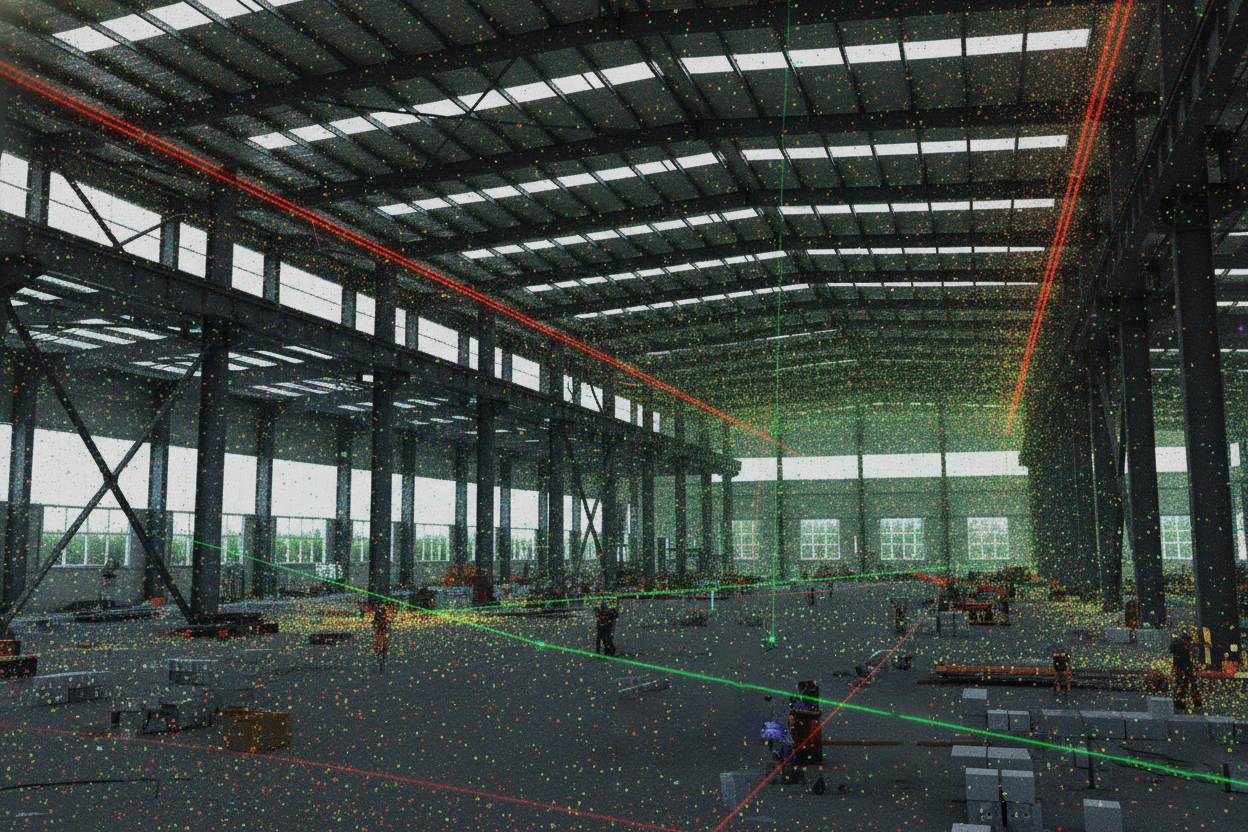
针对超薄型、薄型、厚型三种涂料不同的施工厚度要求,我们的首要任务是“理解”环境。 通过搭载的高精度激光雷达,贝恩机器人能在毫秒间对复杂的钢结构现场进行三维环境识别。
它不依赖图纸,而是实时扫描。无论是高耸的钢柱、交错的横梁,还是周遭复杂的作业环境,都能被机器人精准捕捉。在机器人的“大脑”里,这些不再是物理障碍,而是一组组精确的坐标数据。这就是我们实现自动导航避障的基石。

混乱的现场需要秩序的标尺。
我们用算法的绝对理性,去驯服施工中那些不可控的变量。
(视频来源于网络,侵删)
为什么人工喷涂容易出现开裂、空鼓、颜色不均? 因为人会累,手会抖,距离忽远忽近,移动忽快忽慢。而算法永远冷静。 贝恩机器人的视觉系统不仅仅用于指路,更用于控质。基于视觉反馈,算法实时锁定喷嘴与钢材表面的最佳距离与角度。
-
当识别到平面时:它保持恒定速度,确保漆膜厚度均一,杜绝浪费;
-
当识别到障碍时:瞬间完成三维定位与安全距离计算。算法会结合机器人当前速度、臂展范围,在碰撞发生前的数秒便预判出最佳应对时机。
这种对“规则”的极致执行,是我们解决人工喷涂质量不稳定的核心武器。

进化的方向:从“看见”到“预判”
当然,我们深知目前的视觉系统还不是终点。 面对低温导致的流坠,面对钢桁架复杂节点的死角,我们正在想方设法,让这双“眼睛”变得更加智慧。
我们在研发什么?
-
环境感知升级: 针对涂层干燥阶段的流平与固化控制,我们已开展专项技术预研。目标是探索喷涂工艺与后续处理流程的智能化协同方案,通过数据互通与过程优化,系统性提升施工效率与最终成膜质量。
-
柔性作业引导:为了配合即将推出的遥控柔性喷嘴,视觉算法将升级为“动态捕捉模式”,辅助操作者精准锁定那些曾经的“盲区”。


赋予钢铁以眼睛,是为了让建筑更安全。 赋予代码以逻辑,是为了让施工更从容。
虽然我们还在不断优化,还面临着环境适应性的挑战。 但每一次算法的迭代,都是贝恩机器人向“完美工匠”迈进的一小步。